
高斯滤波算法实现
选题背景
数字图像在获取、传输与存储过程中不可避免地会受到噪声干扰,其中高斯噪声因符合传感器热噪声、光照波动等物理过程的统计特性,成为图像中最常见的噪声类型之一。如何有效抑制高斯噪声的同时最大程度保留图像的边缘与细节结构,是图像预处理阶段的核心问题。高斯滤波作为一种经典的线性平滑滤波技术,凭借其数学上的严谨性(高斯核为尺度空间理论中的唯一线性核[1])、物理上的直观性(邻域像素权重随距离递减)以及计算上的高效性(二维高斯核可分解为两个一维核的级联),在数字图像处理领域占据了基础而重要的地位。
在应用层面,高斯滤波已广泛渗透至众多关键领域。在医学图像分析中,CT、MRI等影像常受高斯噪声污染,高斯滤波作为预处理步骤可提升信噪比,为后续的病灶分割与三维重建提供更可靠的数据基础;在自动驾驶视觉感知中,摄像头采集的图像在弱光或高速运动场景下常伴随噪声,高斯滤波被用于构建尺度空间,支撑SIFT、ORB等特征提取算法的稳定性,从而保障目标检测与跟踪的准确性;在工业缺陷检测中,对金属表面或电子元件的图像进行高斯平滑,可抑制纹理噪声,突显裂纹、划痕等关键缺陷;此外,在图像增强与摄影后期中,高斯模糊被广泛用于背景虚化、光晕模拟及隐私保护,成为图形图像软件中的标准工具。
针对高斯噪声的抑制问题,传统解决思路主要分为空间域与频域两类。空间域方法以高斯滤波为核心,通过构造高斯卷积核直接对图像进行加权平均;频域方法则利用高斯函数的傅里叶变换仍为高斯函数的特性,在频域实现低通滤波。由于二维高斯核具有可分离性,实际实现中常将二维卷积分解为先后执行的行、列一维卷积,将计算复杂度从$O(n^2m^2)$降至$O(n^2m)$(其中,n是图像大小,m是核大小),大幅提升了处理效率。近年来,随着深度学习的发展,可学习的高斯滤波、将高斯先验嵌入卷积神经网络等方法进一步拓展了其应用边界,但传统高斯滤波因其可解释性强、无需训练数据、计算资源消耗低等优势,仍广泛应用于实时系统与资源受限场景。
本次作业选择实现基于可分离卷积的高斯滤波算法,以经典的高斯核生成与快速互相关为核心技术路线。具体而言,我们将: (1)分析高斯核的性质和高斯滤波的去噪原理; (2)利用可分离性将二维滤波转化为行、列两个一维滤波的串联实现,分析其加速效果; (3)在不同滤波参数的组合下,评估高斯滤波的模糊效果; (4)与均值滤波、中值滤波进行对比实验,定量评估滤波后图像的PSNR与SSIM,展示高斯滤波在平滑噪声与保护边缘之间的平衡能力。 通过上述算法设计与实验分析,旨在深入理解高斯滤波的工作原理、参数影响机制及其在实际应用中的适用边界,为后续更复杂的图像处理任务奠定理论与实践基础。
算法描述(重点)
高斯核
二维圆对称的高斯分布如公式所示:
$$G\left(x, y, \sigma\right) = \frac{1}{2\pi\sigma^2}e^{-\left(x^2+y^2\right)/2\sigma^2}$$其中:
- $(x, y)$ 是离核中心的偏置,在连续域中$(x, y) \in \mathbb{R}^2$
- $\sigma$ 是标准差
图像处理领域的高斯核与连续域较为不同,由于离散域对高斯函数进行了截断,需要进行归一化处理,一般表示为:
$$G\left(x, y, \sigma\right) = Ke^{-\left(x^2+y^2\right)/2\sigma^2}$$在离散域中,$(x, y) \in \mathbb{Z}^2$。假设高斯核的宽度为 $m$ 则:
$$K = \frac{1}{\sum^{\left \lfloor m/2 \right \rfloor}_{x = -\left \lfloor m/2 \right \rfloor }\sum^{\left \lfloor m/2 \right \rfloor}_{y = -\left \lfloor m/2 \right \rfloor } e^{-\left(x^2+y^2\right)/2\sigma^2}}$$做这种归一化的目的有二[2]:
(1)恒定灰度区域的平均值保持不变。对于一幅图像中灰度均匀的区域(例如纯色背景),滤波后的结果应保持原有的灰度值不变。若核未归一化(即系数之和不等于 1),则对恒定区域进行卷积后,输出灰度值会被放大或缩小,导致图像整体亮度偏移。归一化保证了当核与恒定灰度区域卷积时,输出等于原灰度值,从而维持了图像的亮度一致性。
(2)防止引入偏差,使原图像和滤波后图像像素和相同。从信号处理的角度,滤波过程可视为对图像像素的加权求和。若核系数之和不为 1,则输出图像的像素总和会发生变化,相当于引入了直流分量的增益或衰减。归一化后,在忽略边界效应的情况下原图像与滤波后图像的像素总和保持不变,即图像的总体能量或平均亮度得以守恒。这保证了滤波操作不会人为地改变图像的整体明暗程度,使结果更符合物理直观。
但同时也导致离散高斯核与实际的高斯函数存在一定的误差。
参数影响
以 5 × 5 大小的高斯核为例:
$\sigma$=0.5(小 $\sigma$):曲线陡峭尖锐,峰值极高,能量几乎全部集中在中心原点。
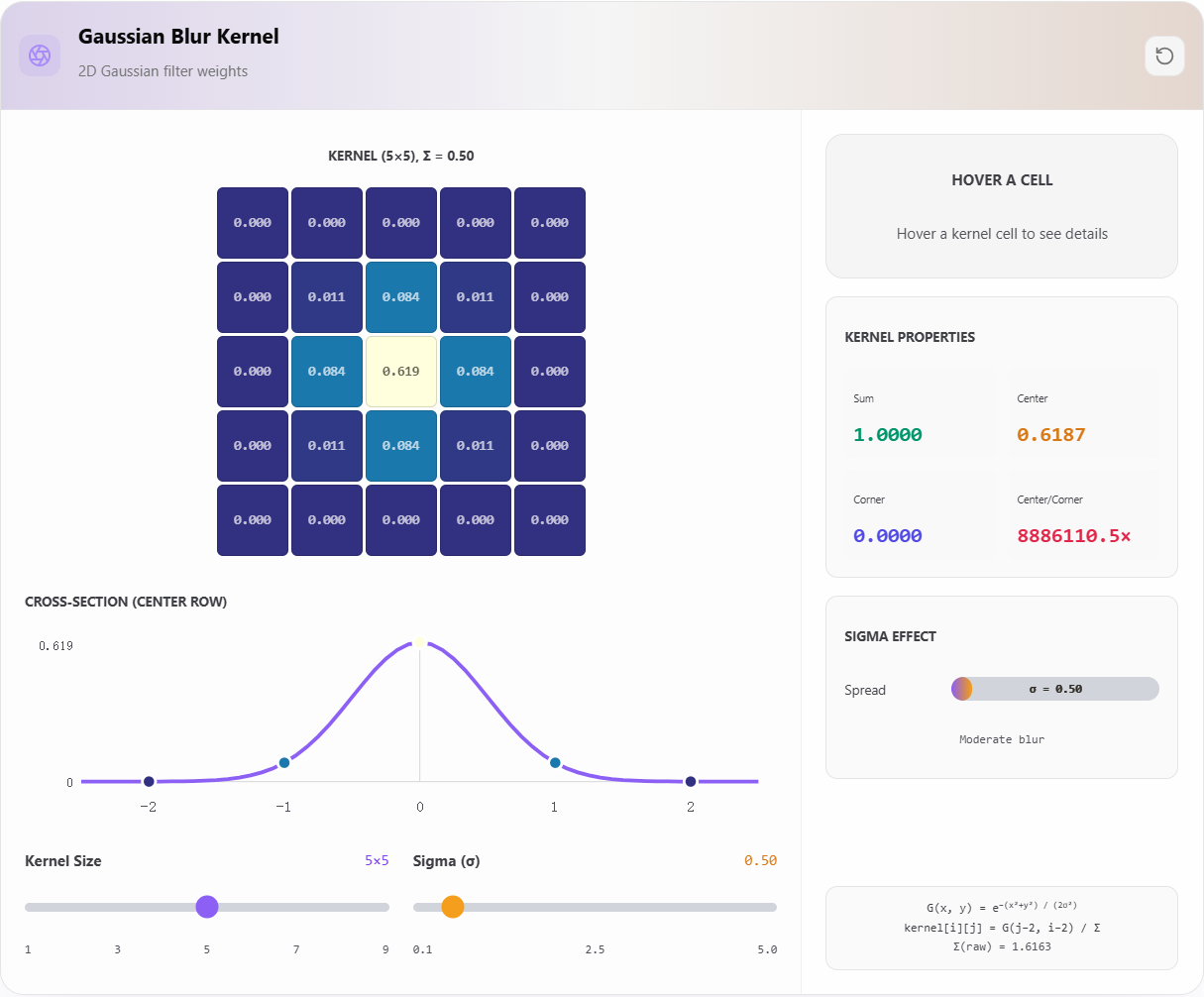
σ=0.5
$\sigma$=1.0(中 $\sigma$):曲线平缓度适中,分布范围与峰值高度均衡。
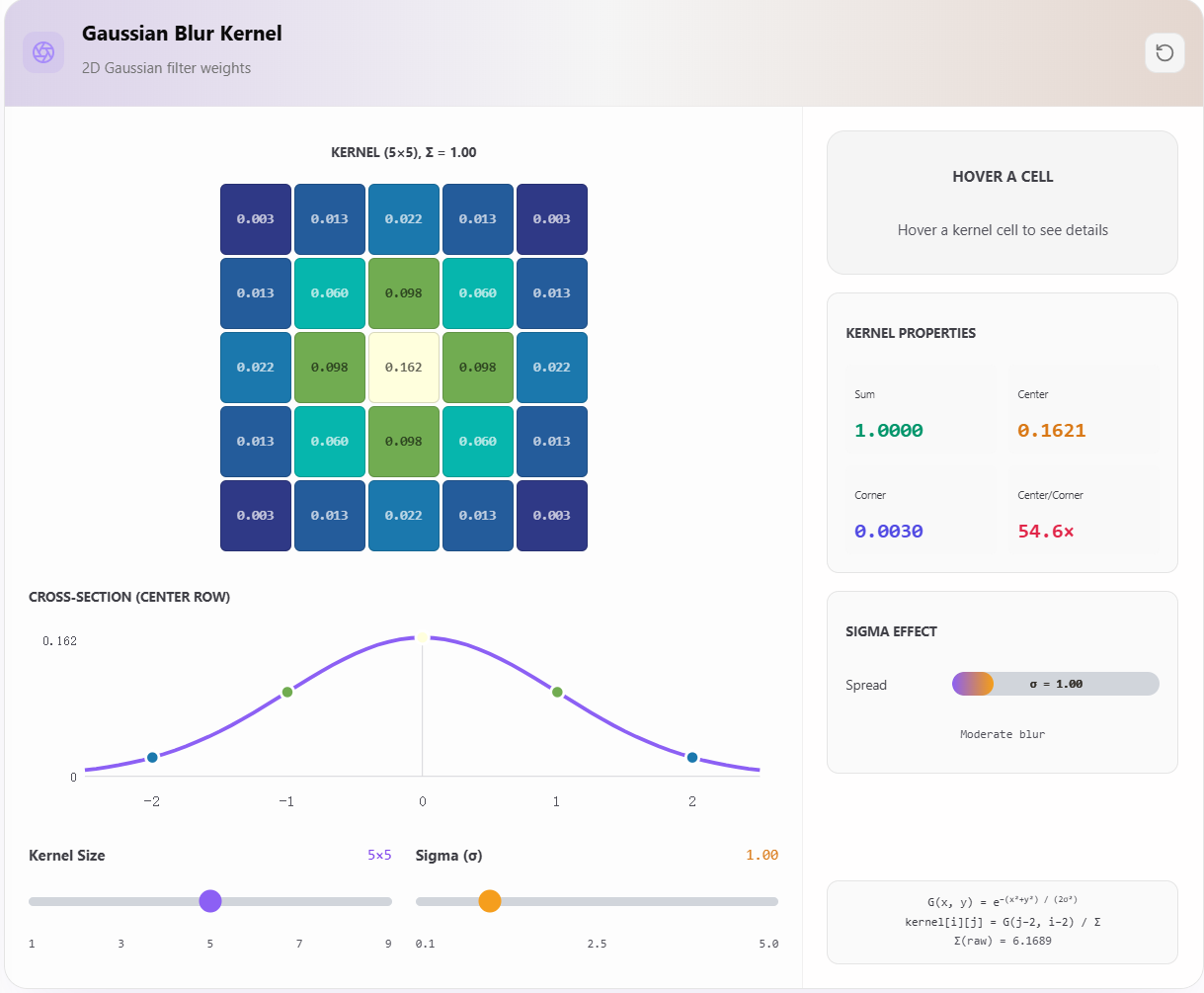
σ=1.0
$\sigma$=3.0(大 $\sigma$):曲线非常平缓宽阔,峰值极低,能量向两侧大范围扩散。
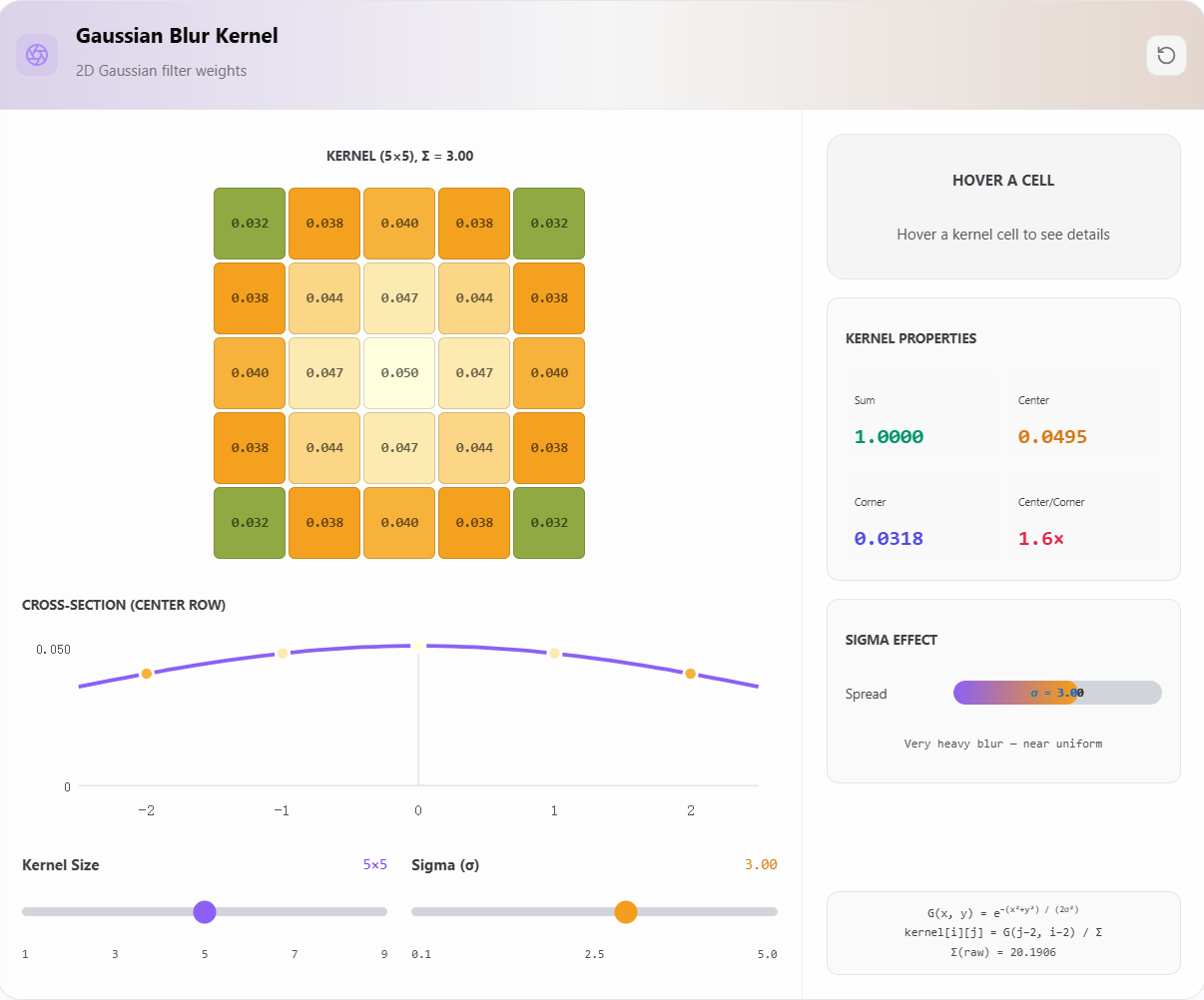
σ=3.0
基于概率论的"$3\sigma$“原则,高斯函数在 $±3\sigma$ 之外的累积概率已接近99.7%。取半宽为 $3\sigma$,总宽度为 $6\sigma$,再加 1 保证中心对称且核尺寸为奇数,即核宽$k_{max} = 2\left\lfloor 3 \sigma\right\rfloor + 1$。此时离散截断带来的误差很小,也意味着在 $±3\sigma$ 之外的取值都接近零。因此,$k_{max}$大小的高斯核处理的结果与任意大小的高斯核得到的结果相同[2]。
性质
可分离性:高斯核是唯一可分离的圆对称核,也是高斯核最重要的计算性质:
$$G(x, y) = G(x) \cdot G(y)$$其中 $ G(x) = \frac{1}{\sqrt{2\pi} \sigma} e^{-\frac{x^2}{2\sigma^2}} $ 是一维高斯函数。 这意味着二维卷积可以分解为两次一维卷积:
- 先对图像每一行进行一维高斯卷积(水平方向);
- 再对结果每一列进行一维高斯卷积(垂直方向)。 若图像尺寸为$n \times n$,核尺寸为 $m \times m$,直接二维卷积的时间复杂度为$O(n^2m^2)$;而分离实现为$O(2n^2m)=O(n^2m)$,当$m$较大时加速效果显著。
各向同性:二维高斯核仅依赖于到中心的距离$r = \sqrt{x^2 + y^2}$,具有各向同性。这一性质保证了滤波效果于方向无关,不会引入方向性伪影,适用于大多数无方向先验的图像处理任务。
卷积与互相关等价:高斯核是偶函数$G(x) = G(-x)$,所以高斯核的卷积与互相关等价,即:
$$G_1 * G_2(x) = G_1 ** G_2(x)$$高斯核对卷积的半群性质:高斯核在卷积运算下封闭,且满足方差相加的规律:
$$G_{\sigma_1} * G_{\sigma_2} = G_{\sqrt{\sigma_1^2 + \sigma_2 ^ 2}}$$即连续两次高斯模糊(标准差分别为$\sigma_1$和$\sigma_2$)等价于一次标准差为$\sqrt{\sigma_1^2 + \sigma_2 ^ 2}$的高斯模糊。
频域特性:高斯函数的傅里叶变换仍为高斯函数,说明在频域范畴属于低通滤波,并且具有平滑的过渡。
算法流程
构建高斯核
步骤 1:选择核尺寸
核尺寸通常取奇数,这样核存在一个明确的中心像素,便于定位。根据"3 $\sigma$“原则,取$size = 2\left\lfloor 3 \sigma\right\rfloor + 1$,这一步决定了核的空间支撑范围。如果 $\sigma$ 较大而核尺寸过小,会截断高斯尾部,导致归一化后核形状失真,影响滤波效果。
步骤 2:计算偏移量
以 $size = 5$ 为例。偏移量范围为 $-2, -1, 0, 1, 2$,分别对应核内各位置相对于中心的距离。偏移量是计算高斯权重的自变量。对于二维核,需要生成 x 和 y 两个方向上的偏移网格。
步骤 3:应用高斯公式
对于每个位置 $(x, y)$(x 和 y 为偏移量),计算未归一化的权重:
$$G'(x, y) = e^{-\frac{x^2 + y^2}{2\sigma^2}}$$对于一维核(可分离实现),则只需计算 $G’(x)$。此时得到的系数之和不等于 1,且 $\sigma$ 越大,截断损失的面积比例越大。
步骤 4:归一化
将所有系数相加得到总和 $sum$,然后将每个系数除以 $sum$,得到最终的高斯核:
$$w\_{\text{normalized}}(x, y) = \frac{G'(x, y)}{\sum_{i,j} G'(i, j)}$$与可分离性的结合
实际实现中,通常不会直接构建二维核再卷积,而是利用可分离性:
- 先构建一维高斯核(同样经过上述步骤,只是在一维偏移上计算并归一化)
- 先对图像每一行进行一维卷积(水平方向)
- 再对结果每一列进行一维卷积(垂直方向)
对边界的处理
滤波通常需要对边界进行扩展,如补零、反射、复制边缘等,以保证输出尺寸与原图一致,然后才从图像的第一格开始作互相关运算。
高斯滤波去噪原理
空间域
高斯噪声是均值为零、独立同分布的随机扰动,对于图像中任一像素,其观测值为真实值加上噪声:
$$I\_{noise}(x, y) = I\_{true}(x,y) + n(x,y), \quad n \sim \mathcal{N}(0, \sigma^2)$$高斯滤波对邻域内像素进行加权平均,权重由高斯核决定。由于噪声的均值为零,且各像素噪声相互独立,加权求和后噪声分量的期望值趋近于零:
$$\mathbb{E}\left[\sum_{i,j}\omega_{i,j}n(i,j)\right] = 0$$其中,$\omega_{i,j}$为高斯核的权重。因此,噪声在加权平均过程中被互相抵消,而图像真实信号因邻域内变化平缓,加权平均后得以保留。
频域
高斯噪声的功率谱在频域中分布较为平坦,能量覆盖所有频率,但因其变化快的特性,主要集中在高频区域。高斯滤波器的频率响应仍然是高斯函数,是一个平滑的低通滤波器,所以能抑制以高频为主的高斯噪声。
与其他滤波器相比
高斯滤波:在平滑效果与边缘保留之间取得最佳平衡,且具有优良的数学性质,是大多数图像处理任务的首选。 均值滤波:实现简单,借助积分图可达到极快速度,但视觉质量较差,适用于对速度要求极高、对模糊质量不敏感的场合。
| 对比维度 | 高斯滤波 | 均值滤波 |
|---|---|---|
| 核形状 | 钟形曲面,中心权重最大,四周平滑衰减 | 矩形均匀分布,所有权重相等 |
| 滤波效果 | 自然平滑模糊,边缘保留较好,无振铃现象 | 均匀模糊,边缘处易产生块状伪影 |
| 边缘保留能力 | 较强 | 较弱 |
| 噪声抑制 | 有效抑制高斯噪声 | 抑制高斯噪声效果略差于高斯滤波 |
| 频域特性 | 高斯函数,低通 | sinc函数,低通 |
| 可分离性 | 可分解为两个一维滤波 | 同样可分离 |
| 计算复杂度 | 通过可分离性实现O(k)每像素 | 同样O(k) |
| 卷积封闭性 | 多次高斯滤波等价于一次 | 多次均值滤波不等价于单次 |
软件实现
本次作业基于Python3.11.0进行实现。高斯滤波分为两个部分,一是构建高斯核,二是将高斯核与原图像进行互相关算法。图片读取依赖python-opencv库的cv2.imread,互相关算法参考了python-opencv的处理逻辑[3]。
构建高斯核
此处考虑更加一般的情况,即高斯核水平和竖直方向的大小和方差可能不一致,所以需要单独进行计算。具体代码如:
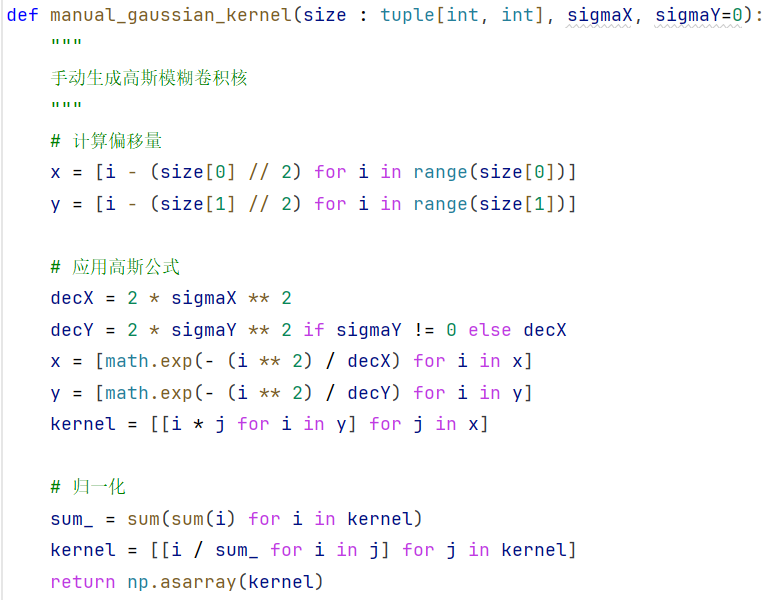
高斯核构建代码
cv2.filter2d
原图像可以有多个通道,对于每一个通道都要进行一次滤波,所以需要将图像转为(height, width, channel)形式。
为了滤波后不改变图像的大小,所以需要在图像周围进行填充,一般有常量填充、复制边缘、反射边缘等方法,这里均进行了实现。在实际中(参考opencv),核并不总是以核中心为锚点(即核的作用点)。锚点的选取也会影响到滤波的效果,锚点位置影响图像周围填充的大小。填充采用numpy.pad函数:
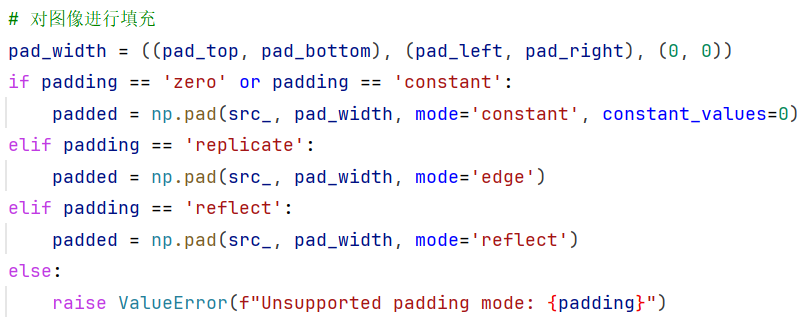
周围填充代码
在opencv中,计算方式如下[3]:
$$\text{dst}(x, y) = \sum\_{x', y'} \text{kernel}(x', y') \cdot \text{src}(x+x'-\text{anchor}.x,, y+y'-\text{anchor}.y)$$$$\quad x'\in \left\[0, \text{kernel}.cols\right], \quad y' \in \left\[0, \text{kernel}.rows\right]$$opencv中,还会引入一个 delta,为滤波后的图像加上偏置,互相关运算代码:
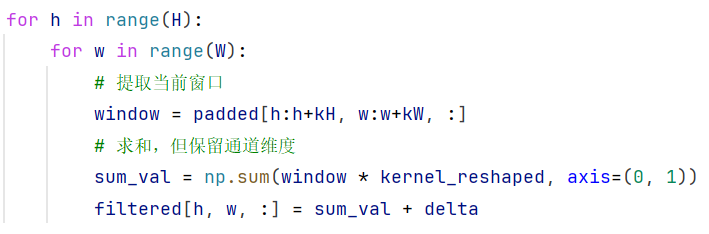
互相关运算代码
利用高斯滤波的可分离性
在先前我们已多次提到可分离性,这里给出代码实现,其中manual_filter2d为上述提到的参考opencv实现的互相关方法。
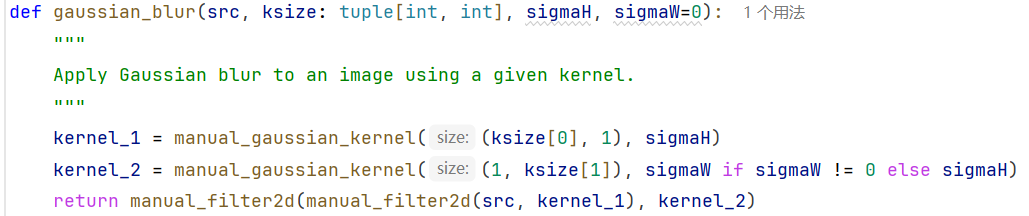
核分离的高斯模糊代码
数据分析和可视化
本节测试图片来自画师JW作品《且慢听说前面风很大》,因为其同时包含细节较多和较少的区域,图片分辨率适中,所以作为实验对象。
处理速度
本部分测试了将核整体进行滤波与将核分离进行滤波的处理时间,图片分辨率为$2800\times1600$,采用$7 \times 7,\quad \sigma=1$的核与$31 \times 31,\quad \sigma=5$的核。从表中我们可以看到,当核的体积较小时,未分离方式所花时间比分离方式少,这是因为分离会多新建一次图像带来耗时,而核体积本身就很小,提速不明显,新建图像的时间开销更大;当核的体积较大时,未分离方式所花时间比分离方式多,此时互相关带来的时间开销超过新建图像的耗时。
| 计算方式 | 未分离 | 分离 |
|---|---|---|
| $7 \times 7,\quad \sigma=1$ | 21.96s | 37.06s |
| $31 \times 31,\quad \sigma=5$ | 94.24s | 41.11s |
模糊
本部分按照$size = 2\left\lfloor 3 \sigma\right\rfloor + 1$取了三个不同方差的高斯核。可以看到,当方差越大时,高斯滤波造成的结果越模糊。将$7 \times 7,\quad \sigma=1$与$19 \times 19,\quad \sigma=1$进行做差,得到的差图全为黑色,进一步证明了最大有效核宽的理论。

原始图像

7×7, σ=1

9×9, σ=1.5

19×19, σ=3

19×19, σ=1
7×7与19×19作差
去噪
指标
1. PSNR (Peak Signal-to-Noise Ratio,峰值信噪比)
PSNR是最常用的图像质量评价指标之一,基于均方误差(MSE)计算,用于衡量去噪后图像与原始图像之间的差异。其数学定义为:
$$\text{MSE} = \frac{1}{MN} \sum_{i=1}^{M} \sum_{j=1}^{N} [I(i,j) - K(i,j)]^2$$$$\text{PSNR} = 10 \cdot \log_{10} \left( \frac{\text{MAX}_I^2}{\text{MSE}} \right)$$其中:
- $M$和$N$分别为图像的高度和宽度
- $I(i,j)$为原始图像在位置$(i,j)$的像素值
- $K(i,j)$为去噪后图像在位置$(i,j)$的像素值
- $\text{MAX}_I$为图像的最大可能像素值(对于8位图像为255)
PSNR值越高,表示图像质量越好。通常认为PSNR大于30dB时图像质量较好,20-30dB为可接受范围,低于20dB则质量较差。
2. SSIM (Structural Similarity Index Measure,结构相似性指数)
SSIM是一种更符合人类视觉感知的图像质量评价指标,从亮度、对比度和结构三个方面综合评估图像相似性。其定义为:
$$ \text{SSIM}(x,y) = [l(x,y)]^\alpha \cdot [c(x,y)]^\beta \cdot [s(x,y)]^\gamma $$其中亮度比较函数:
$$l(x,y) = \frac{2\mu_x\mu_y + C_1}{\mu_x^2 + \mu_y^2 + C_1}$$对比度比较函数:
$$c(x,y) = \frac{2\sigma_x\sigma_y + C_2}{\sigma_x^2 + \sigma_y^2 + C_2}$$结构比较函数:
$$s(x,y) = \frac{\sigma_{xy} + C_3}{\sigma_x\sigma_y + C_3}$$其中:
- $\mu_x, \mu_y$分别为图像$x$和$y$的均值
- $\sigma_x, \sigma_y$分别为图像$x$和$y$的标准差
- $\sigma_{xy}$为图像$x$和$y$的协方差
- $C_1, C_2, C_3$为小的正常数,避免分母为零
- 通常取$\alpha = \beta = \gamma = 1$,$C_3 = C_2/2$
SSIM的取值范围为[0,1],值越接近1表示图像质量越好。相比PSNR,SSIM能更好地反映人类视觉对图像结构信息的感知。
指标应用说明: 在本次实验中,PSNR用于定量评估去噪算法对噪声的抑制能力,而SSIM则用于评估算法在保持图像结构信息方面的表现。两者结合使用能够更全面地评价高斯滤波算法的性能。
高斯噪声
本部分测试了不同大小的高斯核对高斯噪声的处理效果,同时与均值滤波进行比对。原图添加了$\mu=0,\sigma=20$的高斯噪声,分别进行$5 \times 5,\quad \sigma=1$和$9 \times 9,\quad \sigma=1.5$的高斯滤波,以及$5 \times 5$的均值滤波。
对比可知,高斯核越大,对噪声的抑制效果越好,但对图像的模糊程度越高。同等大小下,均值滤波的模糊程度比高斯滤波高,但去噪的效果几乎相同,从指标上可得,高斯滤波的去噪效果较好。
| 滤波方式 | PSNR(dB) | SSIM |
|---|---|---|
| 添加噪声 | 25.19 | 0.45 |
| 高斯滤波$(5 \times 5,\quad \sigma=1)$ | 30.02 | 0.78 |
| 高斯滤波$(9 \times 9,\quad \sigma=1.5)$ | 29.19 | 0.79 |
| 均值滤波$(5 \times 5)$ | 28.85 | 0.76 |

添加了μ=0,σ=20的高斯噪声

进行5×5,σ=1的高斯滤波

进行9×9,σ=1.5的高斯滤波

进行5×5的均值滤波
椒盐噪声
椒盐噪声是图像处理中常见的脉冲噪声类型,表现为图像中随机出现的黑白像素点。其数学模型可表示为:
$$I\_{noise}(x,y) = \begin{cases} 0 & \text{以概率 } p\_1 \\ 255 & \text{以概率 } p\_2 \\ I(x,y) & \text{以概率 } 1-p\_1-p\_2 \end{cases}$$其中$p_1,p_2$为噪声密度,控制噪声强度。
高斯滤波对椒盐噪声的去噪效果有限,主要原因在于:
- 极值敏感性:椒盐噪声为极值噪声(0或255),高斯滤波的加权平均无法有效消除这种极端值
- 权重污染:椒盐噪声点会污染高斯核的权重计算,影响邻域像素的平滑效果
- 边缘模糊:为消除椒盐噪声需要较大的$\sigma$值,但会导致图像过度模糊,丢失细节信息
- 非线性特性:椒盐噪声具有非线性特性,而高斯滤波是线性滤波器,处理效果有限
本部分在测试图像上添加$p_1=0.2,p_2=0.2$的椒盐噪声,分别使用$9\times9$高斯核($\sigma=1.5$)和$5\times5$中值滤波进行对比实验。中值滤波作为非线性滤波器,对椒盐噪声具有更好的处理效果。高斯滤波效果较差。

添加了椒盐噪声

进行9×9,σ=1.5的高斯滤波

进行5×5的中值滤波
结论
本次数字图像处理作业成功实现了基于可分离卷积的高斯滤波算法,并对其在图像模糊和去噪中的应用进行了系统研究。通过理论分析、算法实现和实验验证,达到了预期目标,主要成果总结如下:
主要成果
- 算法实现:成功构建了可分离卷积的高斯滤波算法,实现了高斯核的自动生成、归一化处理以及高效的二维卷积运算。算法充分利用了高斯核的可分离性,将计算复杂度从$O(n^2m^2)$降低到$O(n^2m)$,显著提升了处理效率。
- 理论验证:通过数学推导验证了高斯核的卷积半群性质和频域特性,证明了连续两次高斯模糊等价于一次标准差为$\sqrt{\sigma_1^2 + \sigma_2^2}$的高斯模糊,为参数选择提供了理论依据。
- 实验分析:系统评估了高斯滤波在不同参数设置下的性能表现
模糊程度与参数 $\sigma$ 的关系: 实验验证了标准差 $\sigma$ 对模糊程度的控制作用。当 $\sigma$ 较小时(如 $\sigma = 1$),高斯核能量集中,滤波后图像细节保留较好,仅产生轻微平滑;随着 $\sigma$ 增大(如 $\sigma = 1.5$、$\sigma = 3$),核的支撑范围扩大,权重分布更平坦,图像模糊程度明显增加。同时,依据”$\text{size} = 2\lfloor 3\sigma\rfloor + 1$“的经验公式,当核尺寸达到理论有效宽度后,继续增加核尺寸不再改变滤波结果(如 $7 \times 7, \sigma = 1$ 与 $19 \times 19, \sigma = 1$ 的差图为全黑),验证了截断误差可忽略的结论。
计算效率与可分性: 对比了直接二维卷积与分离卷积的实现效率。对于小核($7 \times 7$),未分离方式耗时 21.96 秒,而分离方式因需额外图像分配反而耗时 37.06 秒;对于大核($31 \times 31$),未分离方式耗时 94.24 秒,分离方式仅耗时 41.11 秒,加速比超过 2 倍。结果表明,可分性在大核滤波时优势显著,而在小核场景下可直接使用二维卷积以避免内存开销。
去噪性能:
- 高斯噪声: 在添加 $\mu = 0, \sigma = 20$ 的高斯噪声图像上,采用 $5 \times 5, \sigma = 1$ 的高斯滤波后,PSNR 从 25.19 dB 提升至 30.02 dB,SSIM 从 0.45 提升至 0.78;同尺寸均值滤波的 PSNR 为 28.85 dB,SSIM 为 0.76。高斯滤波在两项指标上均略优于均值滤波,且当 $\sigma$ 增至 1.5(核尺寸 $9 \times 9$)时,PSNR 虽略有下降(29.19 dB),但 SSIM 仍保持较高水平(0.79),说明在保持结构相似性方面高斯滤波更具优势。
- 椒盐噪声: 在添加密度为 0.2 的椒盐噪声图像上,高斯滤波($9 \times 9, \sigma = 1.5$)无法有效去除极值点,图像中仍残留大量黑白斑点,而中值滤波($5 \times 5$)能基本恢复图像结构。实验表明,高斯滤波对脉冲噪声效果有限,体现了其作为线性滤波器的局限性。
未来改进方向
深度学习应用:将高斯先验嵌入神经网络,实现可学习的高斯滤波。研究基于图像内容的自适应$\sigma$选择策略,实现参数自动化。
多种滤波混合使用:识别不同的噪声特征,采用对应最有效的滤波方式。
通过本次作业,不仅深入理解了高斯滤波的理论基础和实现技术,也为后续更复杂的图像处理任务奠定了坚实基础。高斯滤波作为经典的数字图像处理技术,在保持其基础地位的同时,仍有广阔的研究和应用空间。
参考文献
[1] Lowe, D. G. (2004). Distinctive image features from scale-invariant keypoints. International journal of computer vision, 60(2), 91-110.
[2] Gonzalez, R. C., & Woods, R. E. (2011). Digital image processing. Pearson Education.
[3] OpenCV GaussianBlur Documentation. https://docs.opencv.org/